3 Watts.
Just kidding, obviously this is going to be your favorite answer: “It depends.”
And it doesn’t just depend on the type of sensor you have or the specs of that sensor.
We also need to talk about your own requirements – how accurate a measurement do you need? How long are you willing to wait for that measurement?
While you ponder these questions, let’s take a quick refresher on how noise affects measurements of thermal laser power sensors.
Sources of error when measuring low power:
In the above video, Dr. Greenfield (Ophir CTO) has a complete summary of what can cause an error in your laser power or energy reading.
However, the ones that apply to very low power measurements (relative to your sensor) can be narrowed down to two:
1. Offset
2. Minimum measurable power (based on noise and drift)
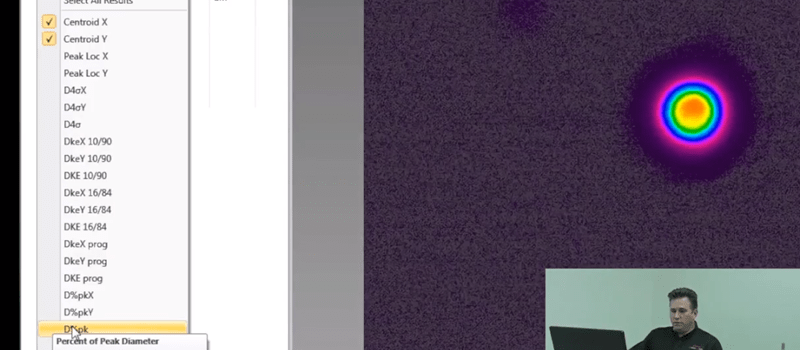
Offset
![Offset [3:26 in above video]](/blog/wp-content/uploads/2017/05/17.5-Ophir-blog-post.png)
This factor can be accounted for with careful background subtraction. (Warning: some things that look like a job for offset are actually not.
See this video post for two cases when NOT to use the offset function.)
Minimum measurable power
![Minimum measurable power [4:13 in above video]](/blog/wp-content/uploads/2017/05/Minimum-measurable-power.png)
RMS noise has several physical sources and is unavoidable. Drift is characterized by a slower change in reading, and is an issue with only some sensors.
In any case, your Ophir sensor has a line in its specifications called “minimum measurable power.” This is calculated as 20 times that noise (and drift, when applicable) to ensure a maximum error of 5%.
Bottom line: How low can you measure?
Of course, we recommend finding a sensor with a minimum measurable power beneath your lowest desired power measurement.
But let’s say you have a 30 W sensor lying around and you just want to know if you can use it for your 2.5 mW laser. The 30A‑BB‑18 has a power range starting at 10 mW. So that’s your minimum measurable power. (Notice the noise itself, which is 2-sigma not RMS, is 0.5 mW, twenty times less than the minimum power.
If 20 times noise gives us a max error of 5%, we can safely predict that 5 times the noise will give an error of up to 20%. Not great.
Can we improve this with averaging?
The answer is averaging will help but often the problem is slow drift in reading. In that case, you can block and unblock the laser to see how the reading changes and that will give a reasonable idea of the laser power. Now what if your laser is 5 mW rather than 2.5 mW? Now the laser is 10 times the noise level, and should produce an error of 10% or less. Is that acceptable? Now that’s your decision.
Conclusion:
If possible, get a sensor with a power range that supports your laser. That’s the best case scenario, and to be frank, that’s when you can be sure that you have Ophir’s guarantee on your side.
If you’re in a pinch, you should be able to measure down to X, assuming a maximum error of Y:
![]()
For best results, try averaging for 3-10 s.







Leave a Reply
Your email address will not be published. Required fields are marked *